| 品牌:艾目易 | 产品特性:非标定制化 | 系统整机精度:0.5mm |
| 开发周期:3~12个月 | 合作范围:根据具体需求选配 | 核心模块:7大模块 |
| 类型:基于光学定位系统 | 型号:AKY-003 | 版权:aimooe |
| 版本号:V1.0 | 运行环境:Windows | 是否进口:否 |
| 软件形式:绿色版 | 版本语言:C++ | 软件名称:手术机器人DEMO |
| 上市时间:2022年 | 硬件要求:光学定位 | 技术支持:有 |
| 支持用户数:不限 |
软件功能模块

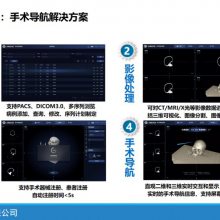
主要为手术机器人SDK,手术机器人SDK的开发环境为"windows+VS2017以上+QT5.12",开发语言为C++,同时为用户提供示例工程与API文档,示例工程可实现从“影像导入-三维可视化-手术路径规划-空间注册-机器人标定-机器人导航”全过程。
01影像管理模块
该模块提供的接口包括:文件加载、文件信息获取、文件信息设置、文件输出、文件关闭,能处理CT/MRI/CBCT等医学影像DICOM数据,实现影像数据解析与加载。开发人员可以基于该模块获取到的影像数据,自行进行图像分割、图像融合等二次开发。
02手术规划模块
该模块主要包含二三维影像显示、选点与交互的相关接口,可以实现三维可视化、二三维界面的交互以及二维面上点的选取(选取的点可以是手动选取或数据自动生成),开发人员可根据需求实现路径规划的二次开发。
03手术导航模块
该模块提供的接口包括:定位仪控制的相关接口、标记球提取、空间注册、工具注册和工具信息读取等,实现图像空间与实际空间的配准、手术工具末端信息获取以及导航功能。
04机械臂控制模块
当前支持UR大族)思灵|遨博珞石等机械臂,该模块提供的接口包括:机械臂控制、机械臂标定、机械臂导航、定位仪与机械臂的坐标转换、以及VTK三维坐标与定位仪坐标转换,实现机械臂导航功能